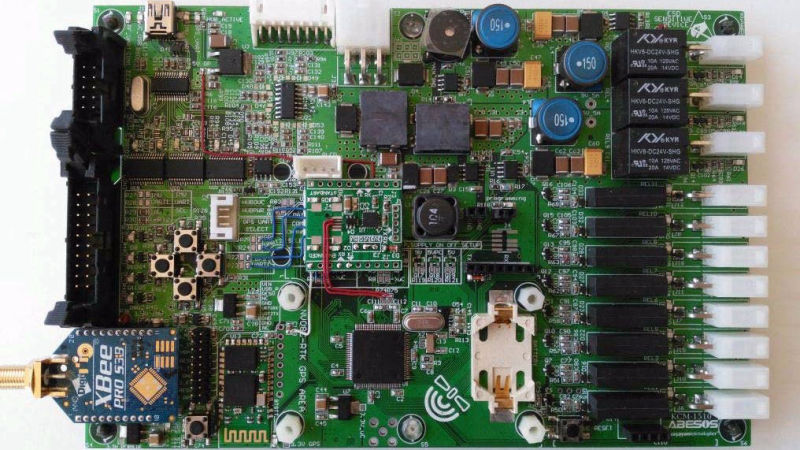
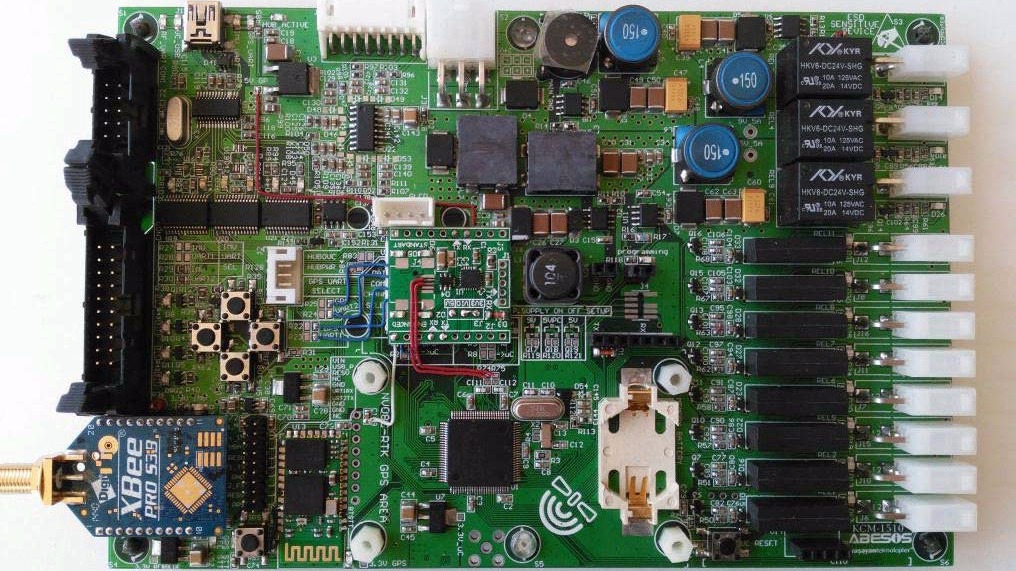
IMU
We have IMU unit powered by our algorythms to combine positioning datas from Gyroscope to level image, Compass to get looking point of camera
HIGH ACCURACY POSITIONING FOR PHOTOGRAMETRY
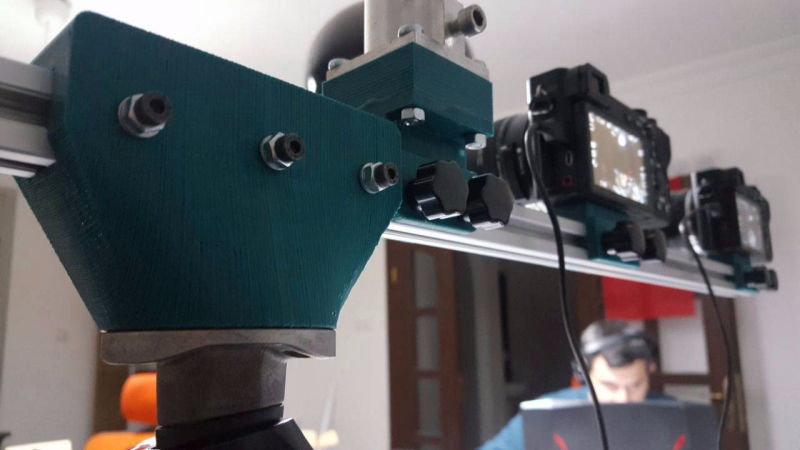
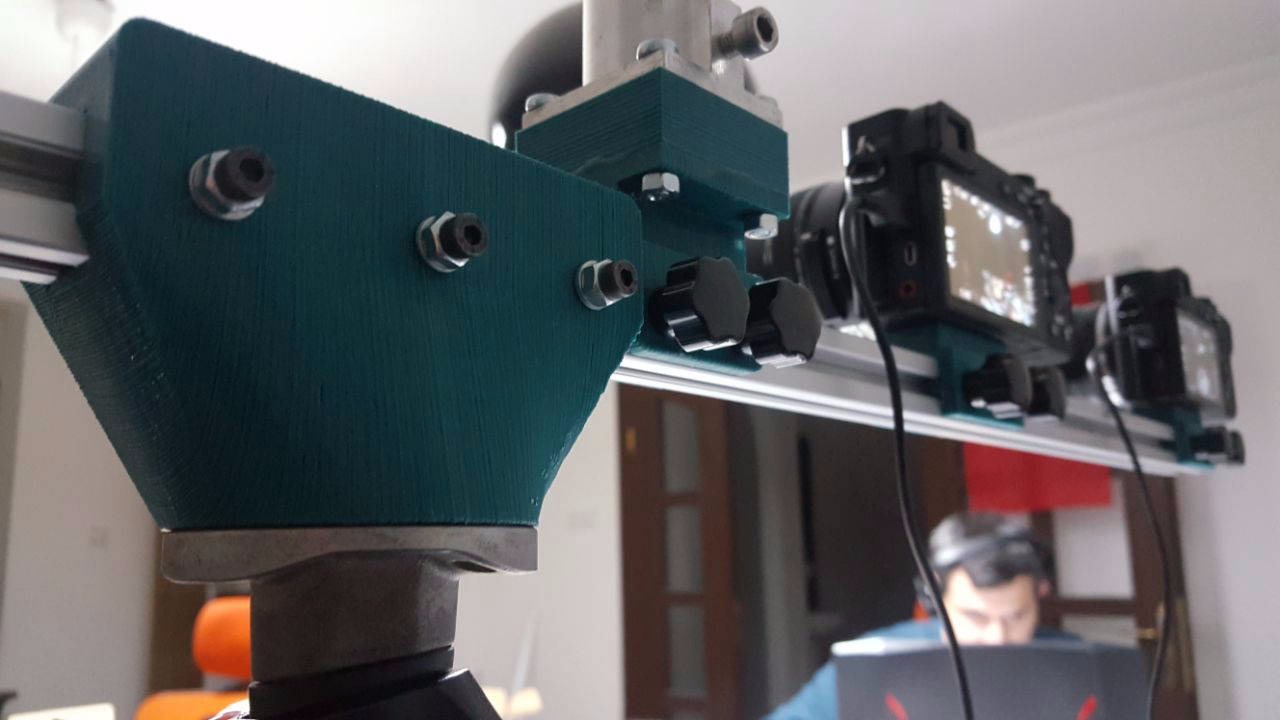
MULTIPLE CALIBRATED CAMERAS CONTROL SOLUTION
TUBITAK R&D PROJECT 2012 - 2017

We have IMU unit powered by our algorythms to combine positioning datas from Gyroscope to level image, Compass to get looking point of camera
We have RTK based GPS solution inside Pano-X BOT, Rover based system integrated to panoramic bot and connect to RTK GNSS server from internet or 1-5km with RF to base station that named PANO-X Basestation
This solutions make low noise data in photogrametric pointcloud output solution. Calibrated cameras gives only take single shot that can make measurement from positioned high resolution cameras